搞了一天英语演讲,累人。总算是玩了40分钟乐高。唉,明天英语比赛。。。加上考试炸了。。。
切入正题
————————————————————————————————————————————————————————————————————————————————————
上一个帖子里面做了一个魔方机器人的雏形,其实只是一个结构。但是又有很多的问题。比如:
第一个:只有两个抓手。当一个抓手张开的时候,另外一个抓手抓不稳魔方,导致魔方掉落。
第二个:两个抓手效率低。
第三个:一个抓手用两个马达控制,控制抓手张合的是通过小电机,控制抓手转弯是通过大电机驱动齿盘。因为抓手张合的电机是通过轴传动,经过齿盘中央,所以转动时两个马达的速度和角度比例是需要控制好的。需要非常精确。而这个难以做到。
综上所述,缺点重重,而且效果非常不好。
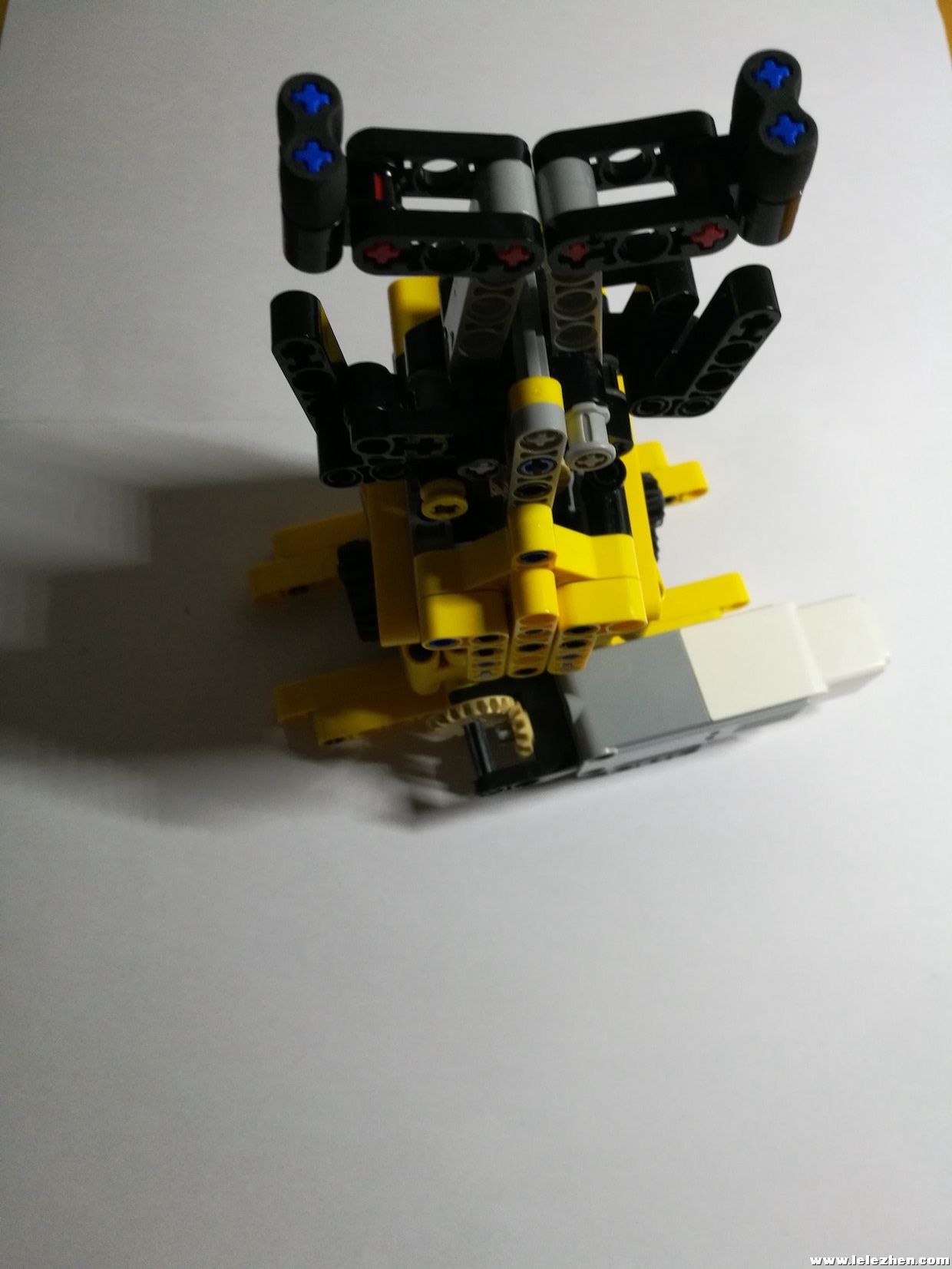
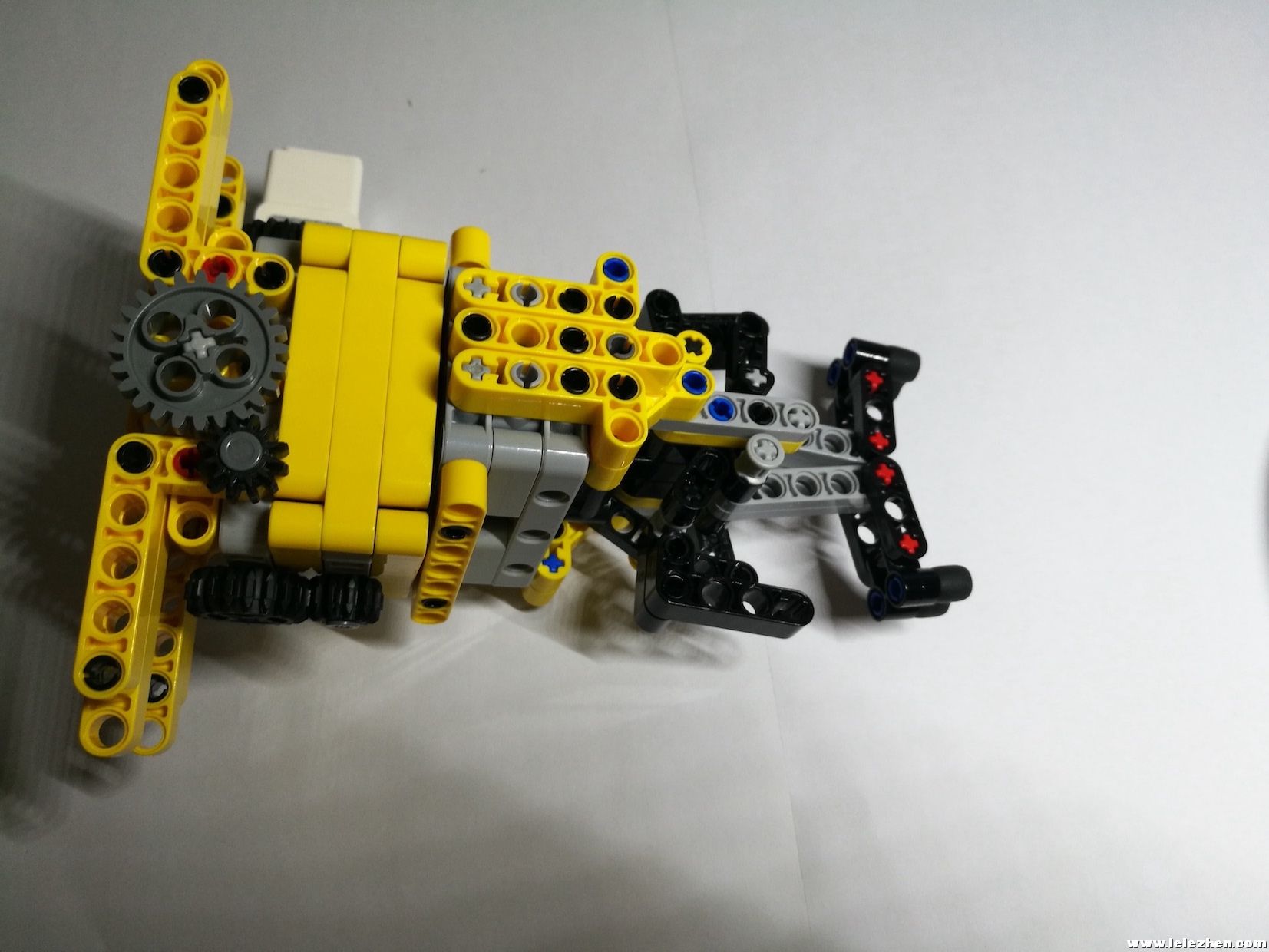
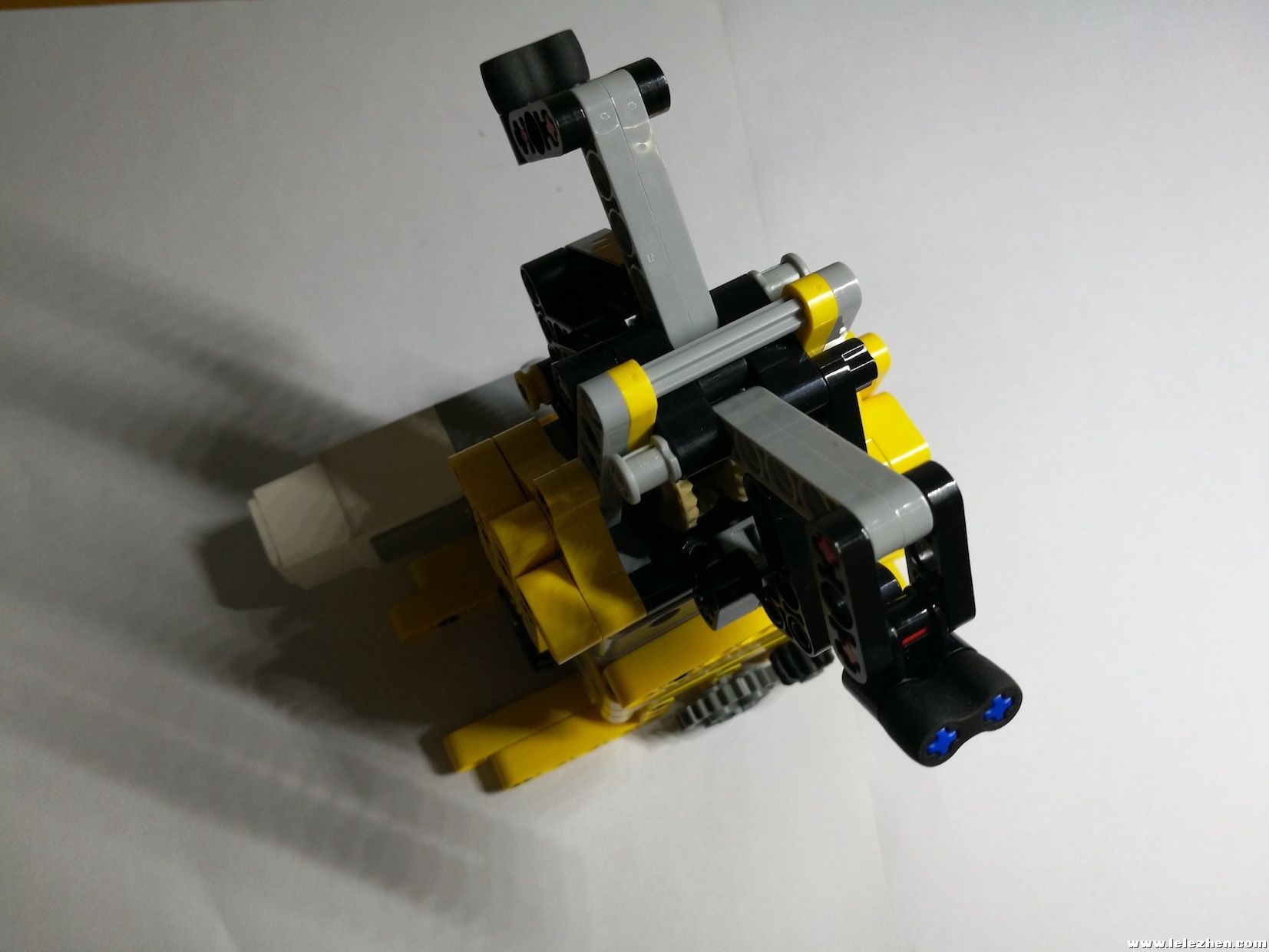
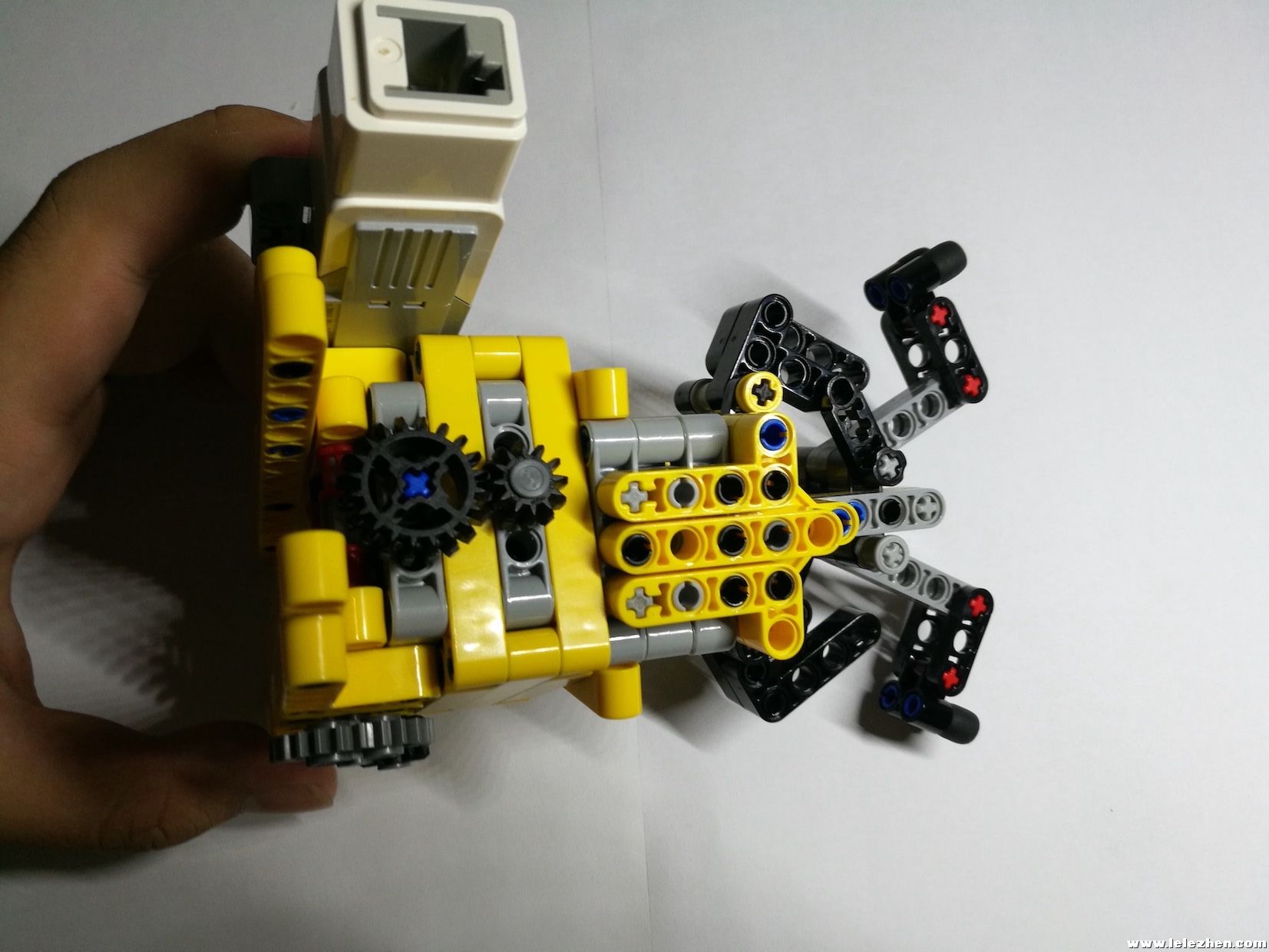
所以今天推翻了前面两个马达的设计。抓手的“手”部分的结构基本没变,只用一个马达,完成两个动作。
其做法是撤掉驱动转盘的马达,利用阻力,使得转盘不轻易转动。当抓手张合到一定角度的时候,抓手卡死。因为是轴的传动,所以驱动抓手张合的马达这时驱动抓手的旋转。像这样,就能够完成了一个马达实现两个动作的目的了。效果不错。
上图:
其实整个魔方机器人结构上已经做好了。只是还差两个摩擦零件懒得找。等到今天有空时再拍照上图吧。比原来的那个版本帅气多了。就是程序。。。真的没有感觉啊。现在连swift的相机模块和蓝牙模块怎么用还不知道。。。Whatever,加油!