电机是电动汽车、机器人和无人机等的动力驱动,电机的分类方法多种多样,包括直流电机和交流电机,同步电机和异步电机,有刷电机和无刷电机,步进电机和伺服电机等等。

LEGO 的全系列电机包括 Power Functions 、Boost 、MINDSTORMS EV3 三个系列,主要有8种电机。
电机控制是控制器最主要的功能。
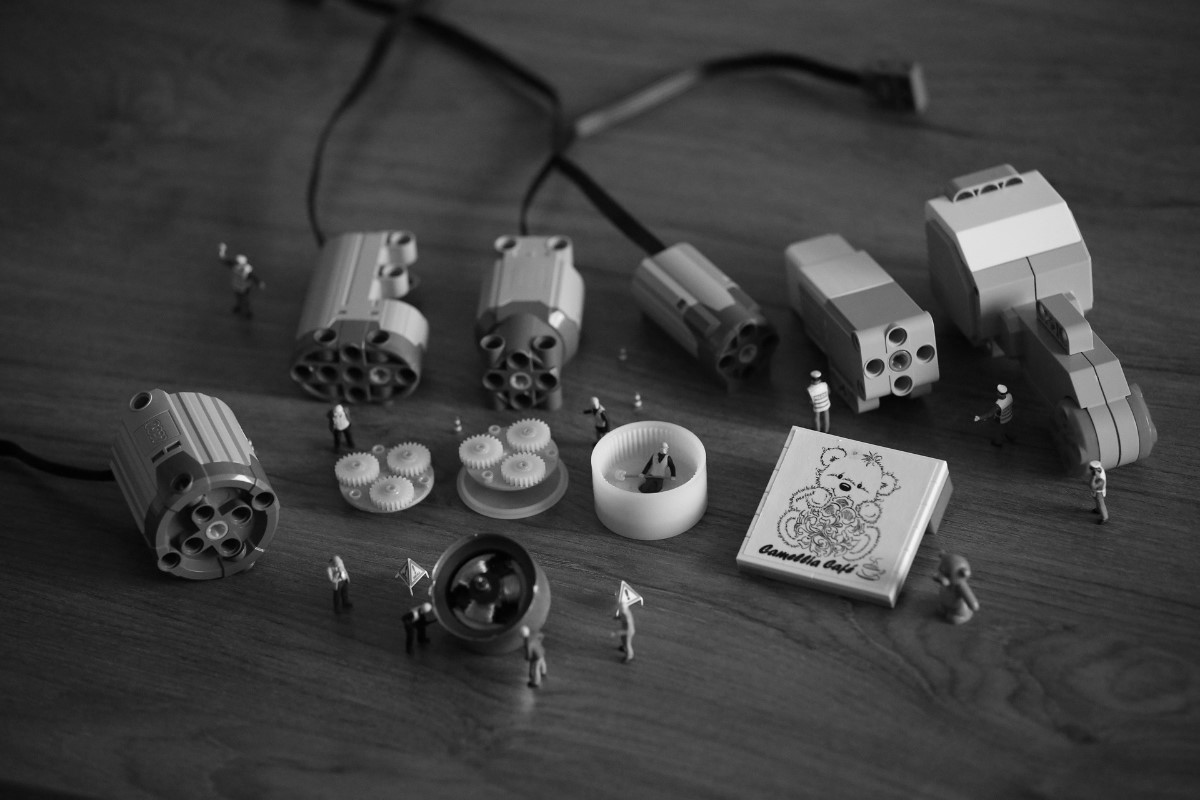
LEGO的 Power Functions 系列包括三种直流电机即M、X、XL,和一种舵机(简易版伺服电机),一般采用电池盒配合其红外控制器控制。

LEGO直流电机及实际的直流电机的控制包括:
+ 调节转速
+ 改变转向
+ 控制运行时间
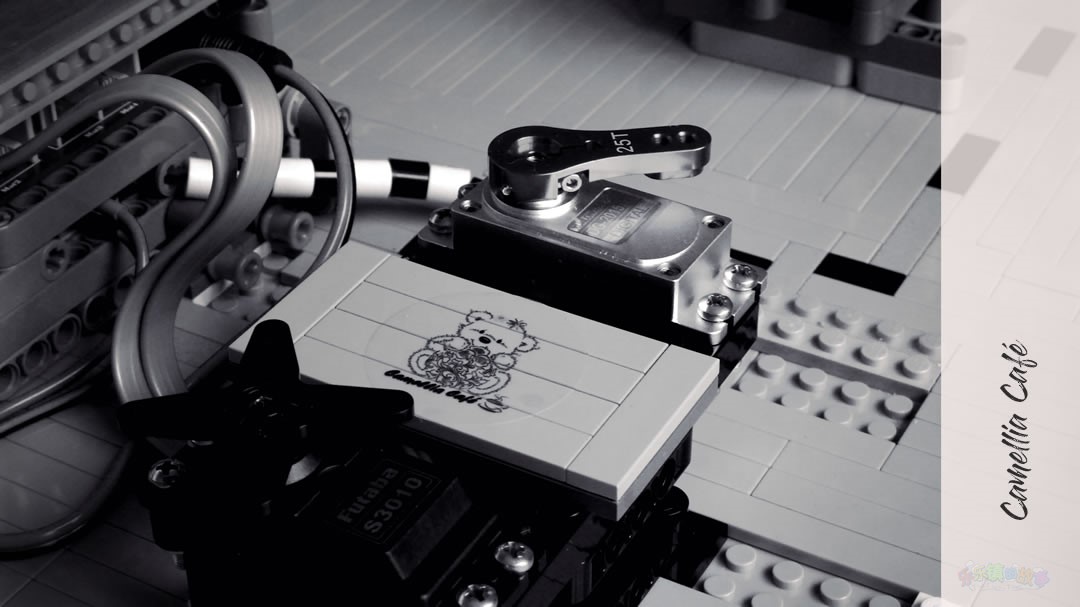
舵机其实是简易版的伺服舵机,舵机不是连续旋转的,其在一定角度范围内运行,例如0-90度,0-180度,0-270度等,其在汽车模型的方向盘控制,机器人手臂,无人机摄像头方向控制等应用的较多,是航模爱好者常用的一种电机。
实际的舵机分为模拟式舵机和数字式舵机,通过脉宽调制技术,即改变电压信号的占空比来实现对电机旋转角度的控制。通常数字式舵机价格相对较高,但其脉宽控制信号的频率相对较高,可以到400~500Hz,调节更加灵敏,电机响应也较好,而模拟式舵机只有50~100Hz。
LEGO 的 Boost 系列是2018新出的系列,包括一种直流电机和一种伺服电机(称作交互式电机),采用 Boost 主机控制,其通过平板设计采用模块式的方式编程和开发用户界面。
LEGO 的 MINDSTORMS EV3 包括两种伺服电机,一种是中型,一种是大型,采用 EV 3 主机控制,其通过电脑或平板,同样采用模块式的方式编程和开发用户界面。
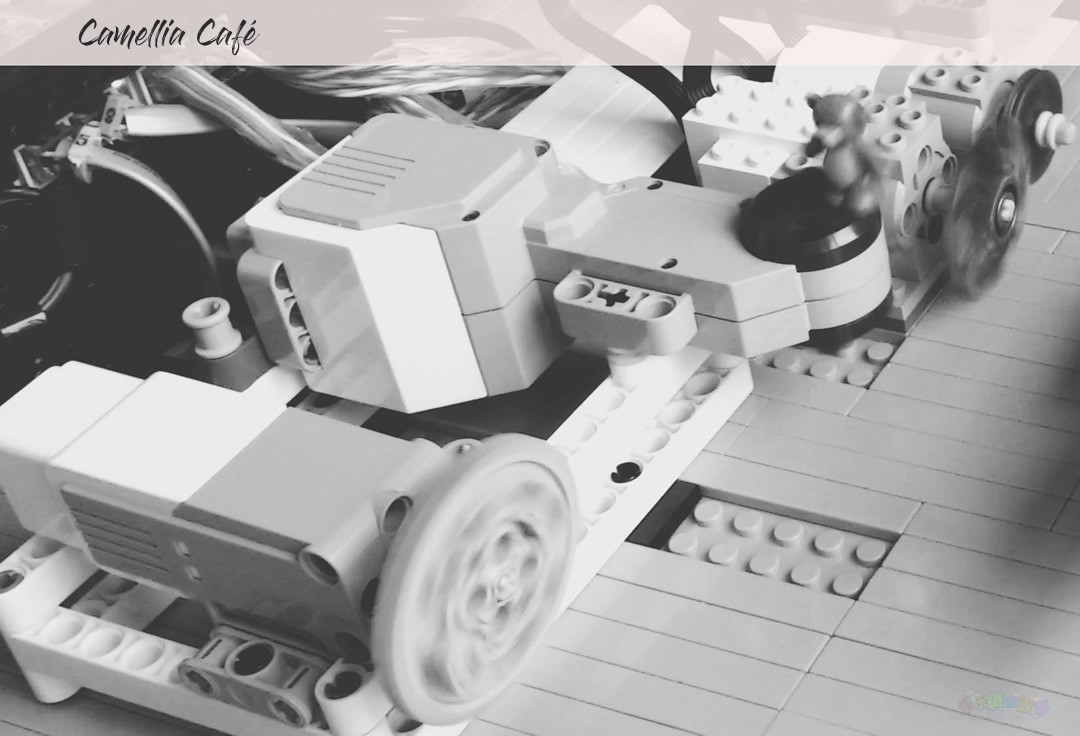
伺服电机一般是减速箱+直流电机+编码器的机构,外带或内部集成控制芯片,自成闭环系统,广泛应用于对速度、角度(位置)有高精确要求的场合,对于自动泊车技术、机器臂生产线、机器人运行以及无人机摄像等,意义重大。
+ 其运行时间控制与直流电机相同
+ 转向控制增加了反馈检测环节
+ 通过编码器或霍尔元件检测电机的转速或运行角度,还分别实现了转速、角度(位置)的闭环反馈控制
LEGO 电机都带有齿轮箱,各种电机的减速比不同:直流电机和中型伺服电机的采用2级行星减速箱,减速比大概为36:1;大型伺服电机采用多级齿轮组加速,减速比大概为54:1,减速比越大,输出速度越低,扭矩越大,但是减速齿轮的增多也增加了摩檫损耗。中型伺服电机和大型伺服电机的编码器的线数不同,但编码器的线数都较少,在10以内。实际工业级的线数要大大多于此,提高了检测精度。

LEGO 的电机控制系统已经相对完善了,是黑箱式的模式,非常适合孩子们开发和学习,但是自主开发权,无论在软件还是硬件层面都相对很窄,对于高级玩家,为了更大程度的MOC,包括硬件和软件两个层面,我们需要拓展 LEGO 的 EV 3 以及 Boost 的功能,不仅能控制更多种类的电机,还需要把软件功能扩展,即把软件内部的算法设计地更加强大,而且操作界面更加自主。
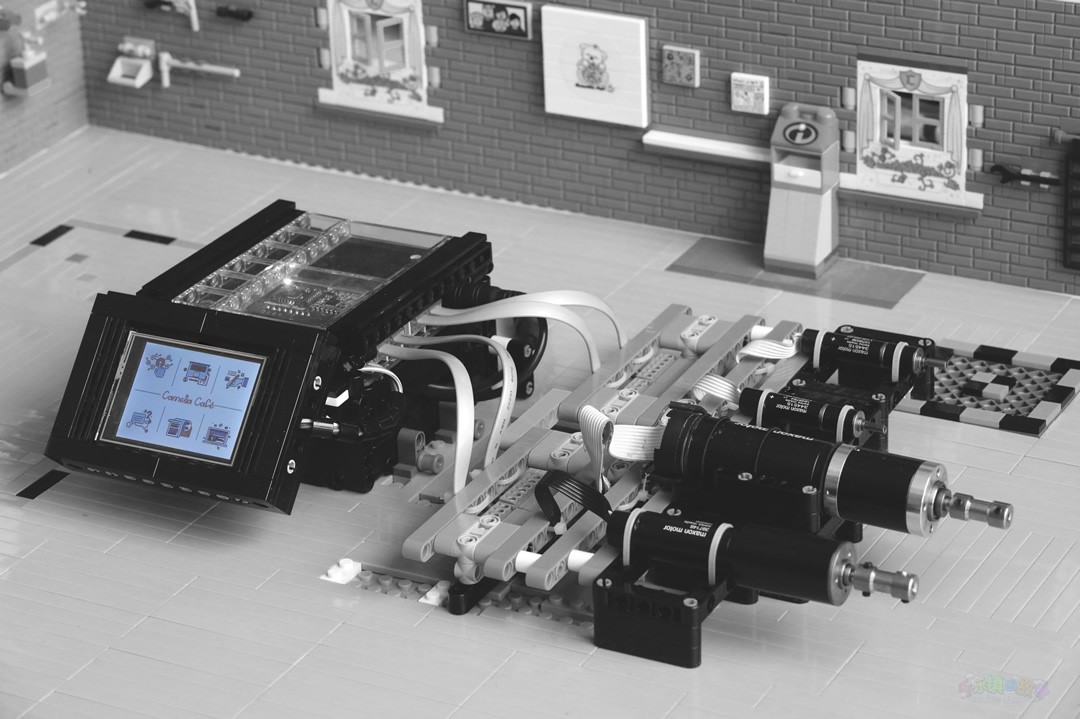
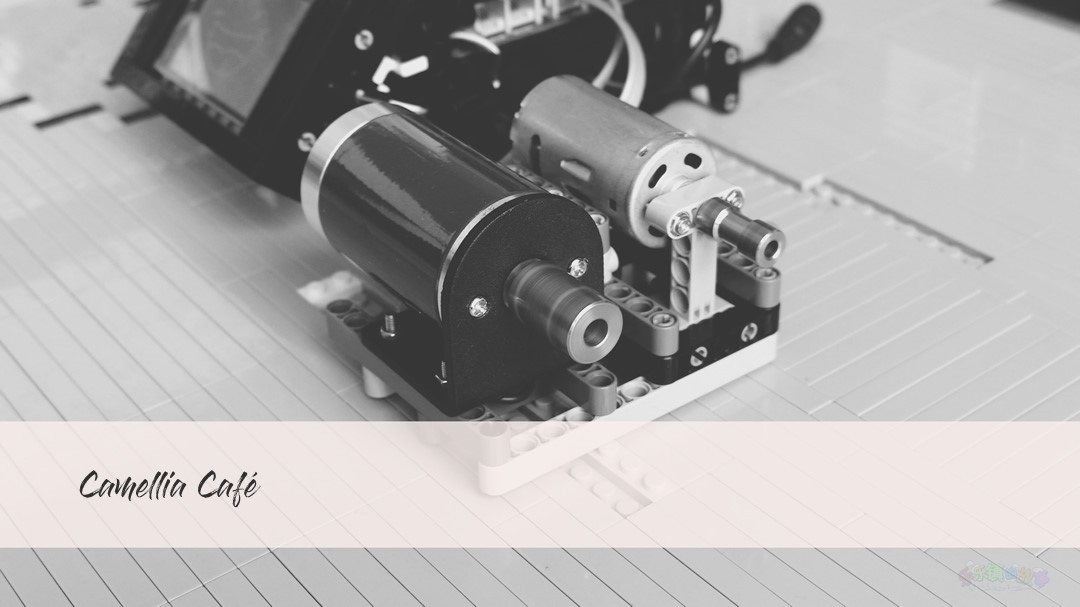
Camellia 自己深入研究LEGO电机及实际电机的特性,制作了嵌入式控制器,实现上述对应功能,并且拓展功能,都是为了更好的MOC和学习前沿技术。
+ 据电机驱动对象(负载)的特性,控制器采用比例+积分+微分(P.I.D)控制算法,调节控制响应过程及控制效果,例如比例作用可调节过渡过程的时间,积分作用可消除余差,微分作用可减小对象滞后的影响等,实际中还应判断对象是否允许超调等情况,合理设定特定的参数
+ 控制器需要具备电机系统配置功能,以满足不同减速比的齿轮箱、电机和不同线数的编码器(或霍尔检测元件)的组合,增强控制器的通用性
+ 动电压范围从6V 至 24V
+ 脉宽调制(PWM)从5%至95%
+ 虑惯性、能量守恒等引起的安全问题,对于大功率、高转速和大负荷等工况,控制器应具备电机软启动及速度平滑调整功能,以防止操作过程中,电机及设备的损坏
同时还需要考虑人机接口,通过触摸屏或按钮控制电机,并通过彩屏展示电机或控制器的状态等信息。
自然语言处理技术(NLP)是人工智能和计算机科学技术在人机交互领域的研究的重点,是下一代产品的关键。

一部自动导航电动汽车、一台工业机器臂、一台机器人、一架无人机内部通常安装多部电机,以驱动不同的部件,这些部件需要协调动作。控制器应统一指挥多部电机,并根据各电机的状态反馈信息,构成多输入多输出闭环控制系统。嵌入式系列控制器扩展了多电机协调控制功能,形成群智技术(Swarm Intelligence),同时操作任意组合的多部电机,或顺序控制各部电机完成规定的程序。每部电机或每台控制器可与其他电机或控制器通讯,并在电脑/手机/平板的中央监控下,完成集体动作:使汽车的4个车轮独立运行以方便小半径泊车,2部机器手臂协同动作,3个机器人共舞,多架无人机在夜空中绽放3D电子烟火……
在设计和使用模型时,必须充分考虑安全因素,例如正确使用电源,避免短路,避免电机及转动设备堵转,为旋转桨叶增加防护罩,保证模型运行在安全范围内等。
无论是自己搭建的模型例如乐高机器人,还是市场上的成熟产品,各种电动汽车、机器人和无人机都有特定的功能,即使是同类产品,每个产品个体也有自己的机械和电子特性,例如重载电动汽车模型需要强大的驱动能力,工业机器手臂需要高精度和高准确度的性能并避免运行到机械奇点,无人机同时需要强大的电机驱动能力和快速响应时间 ……
控制器是驱动设备的直接设备,通常也称作下位控制器,其内部集成多种软、硬件功能模块可供调用,满足上述产品个体设计的专门需要:例如多电机同步协调操作、软启动、顺序控制、智能控制等功能。如果特定模型或特殊产品需要设计专门的功能,亦可通过算法的编制,复杂可编程逻辑器件的硬件编程,定制开发。触摸屏、简洁按钮、外围拓展设备接口、指示灯、蜂鸣器等为您产品的功能拓展带来了便利。
电脑、手机和平板是监控控制器的上位控制器,与下位控制器构成串级闭环控制回路。下位控制保证控制效果的快速准确,上位控制接收人类指令,并可协调多部下位控制器。只有开放式的二次开发才能方便设计专用的用户界面和操作功能。
控制器的硬件和软件并不各自为战,它们紧密配合,共同完成设定的功能。
无论是充分利用LEGO的控制器,还是挑战自我,开发拓展,希望这些内容有助于大家了解电机及电机控制知识。
