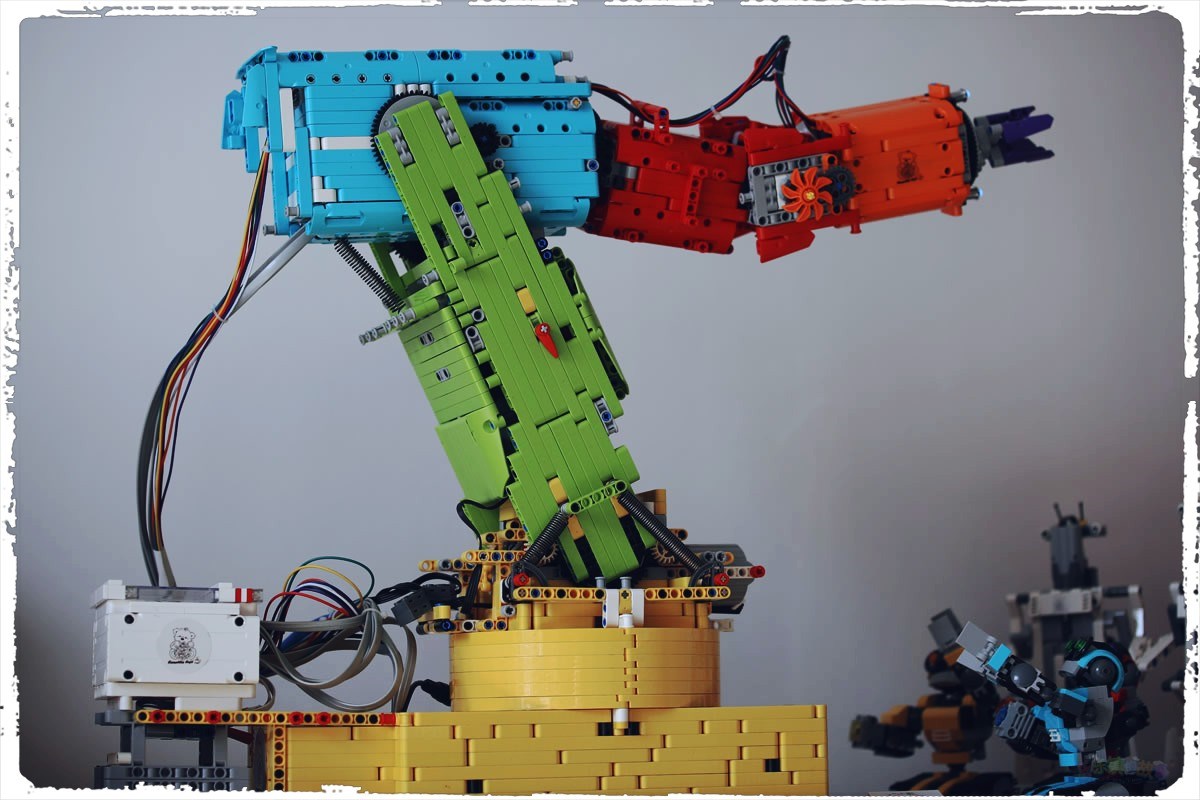
Serial robot arm is designed as a series of links connected by motor-actuated joints that extend from a base to an end-effector. It has a large workspace with respect to the size of the robot and the floor space it occupies. However, as Serial robot arm is an open kinematic structure, it has the low stiffness. And its errors are accumulated and amplified from link to link. It also needs a perfect counterbalance design to carry and move the large weight of most of the actuators.
1. Yellow: this servo motor is the first axes. It rotates from -180 degree to +180 degree in the horizonal plane.
1. 黄:在水平面内,从-180到180度旋转。
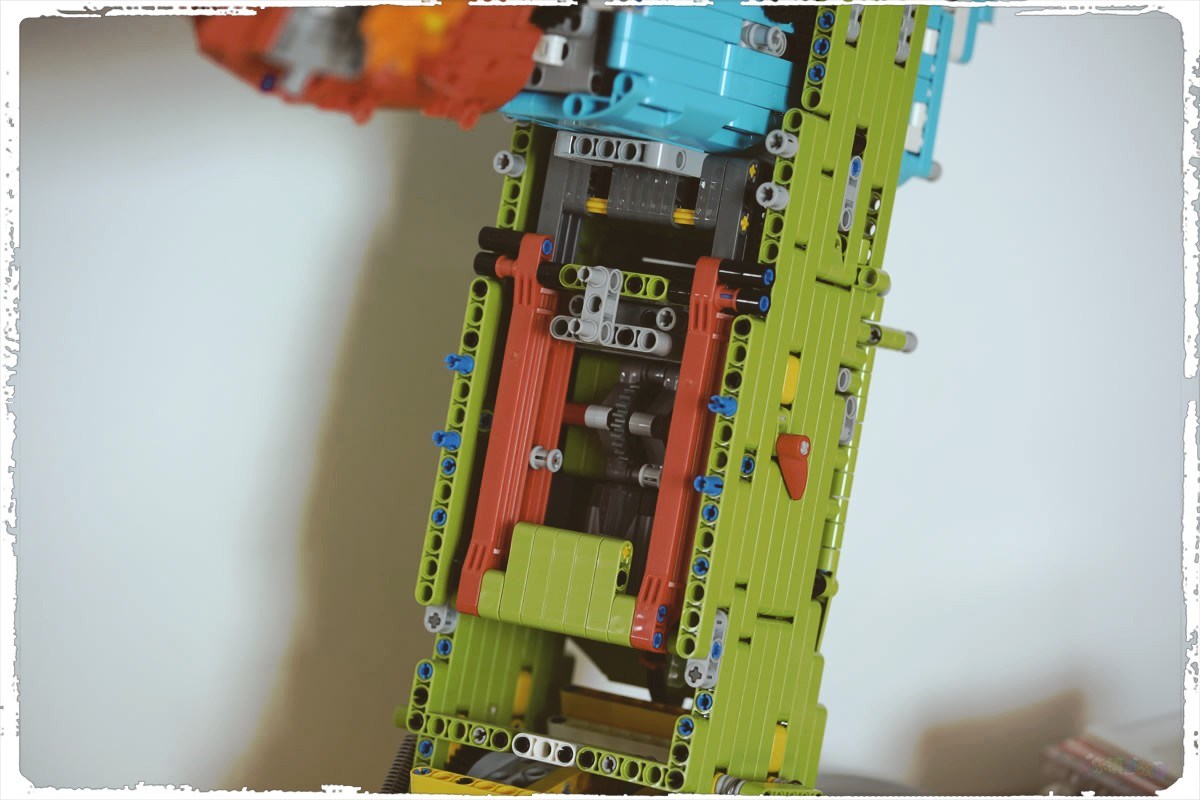
2. Green: this motor is the second axes. It rotates from -45 degree to +30 degree in the vertical plane to make the robot arm move forward or backward.
2. 绿:在垂直平面内,从-45到30度运动,使机器人手臂前摆或后摆。
3. Blue: this motor is the third axes. It rotates from -15 degree to +30 degree in the vertical plane to make the robot arm move upward or downward.
3. 蓝:在垂直平面内,从-15到30度运动,使机器人手臂上升或下降。
4. Red: this servo motor is the fourth axes. It rotates from 0 degree to 360 degree to make the robot arm spin.
4. 红:从0到360度旋转机器人手臂。
5. Orange: this servo motor is the fifth axes. It rotates from -90 degree to +90 degree in the vertical plane to swing the robot wrist.
5. 橙:在垂直平面内,从-90到90度运动,使机器人手腕摆动。
6. Purple: this servo motor is the sixth axes. It rotates from 0 degree to 360 degree to make the robot wrist spin.
6. 紫:从0到360度旋转机器人手腕。
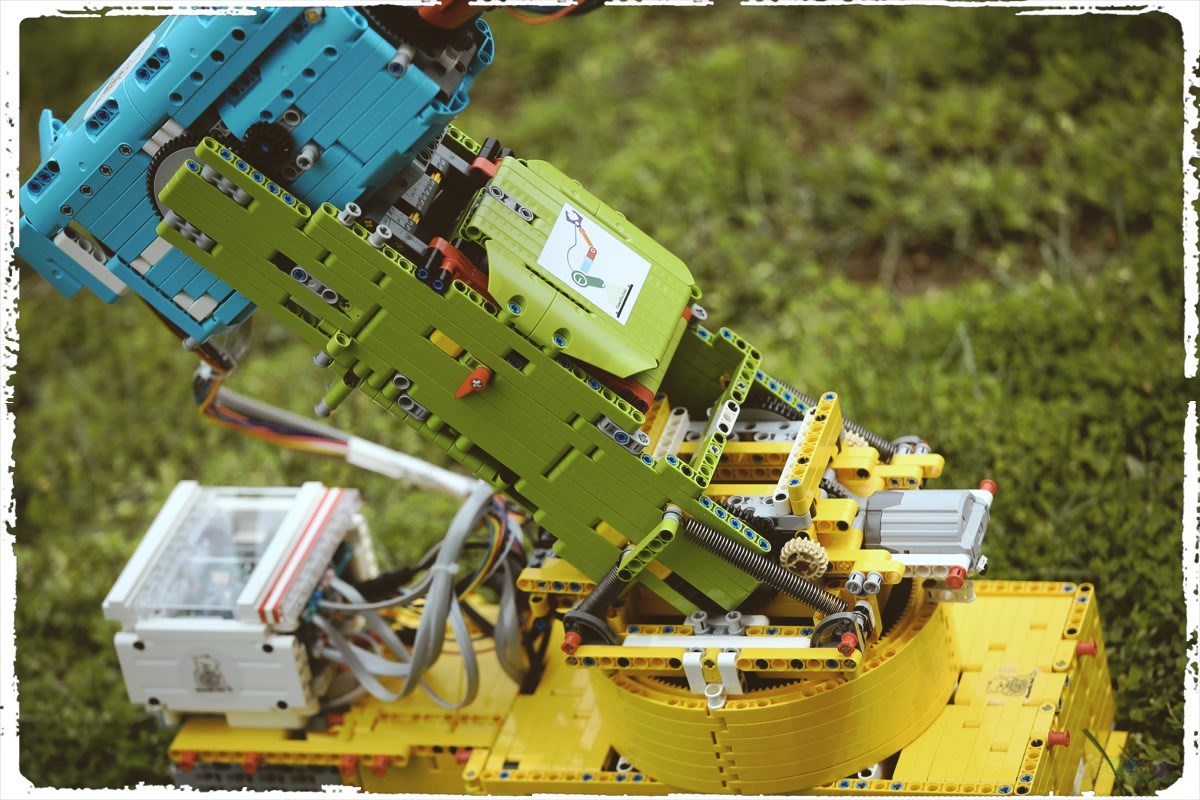
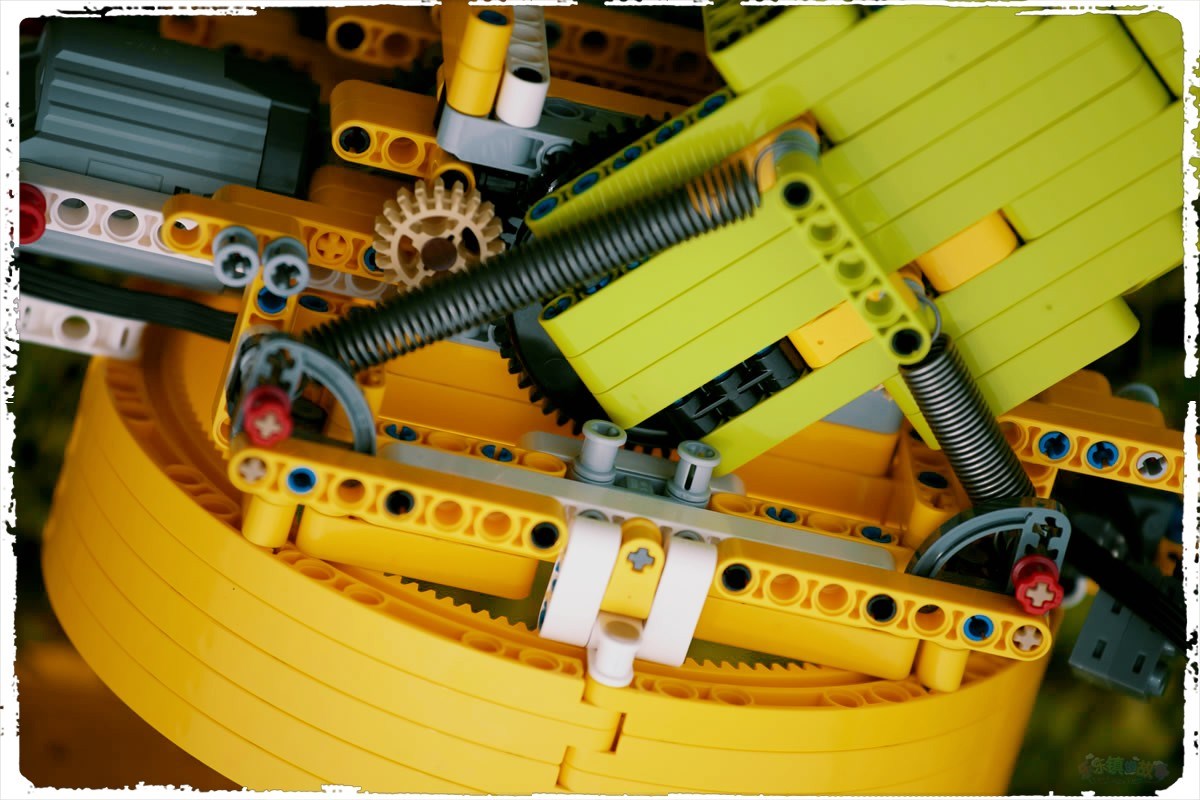
Counterbalance
机器人自平衡
There are four ways of counterbalance: 1) Counterweight, 2) Springs, 3) Balanced links and 4) Pneumatic cylinder.
A gyroscope can be used to sense the tile of the robot or droid, the controller then predict trends of unbalance, and adjust counterbalance system.
通常采用的自平衡方法有:1)配重方式,2)弹簧阻尼,3)连杆机构和4)气动活塞。
控制器通过陀螺仪测量机器人及其部件的倾斜程度,预测其不平衡状态,自动调整自平衡系统。
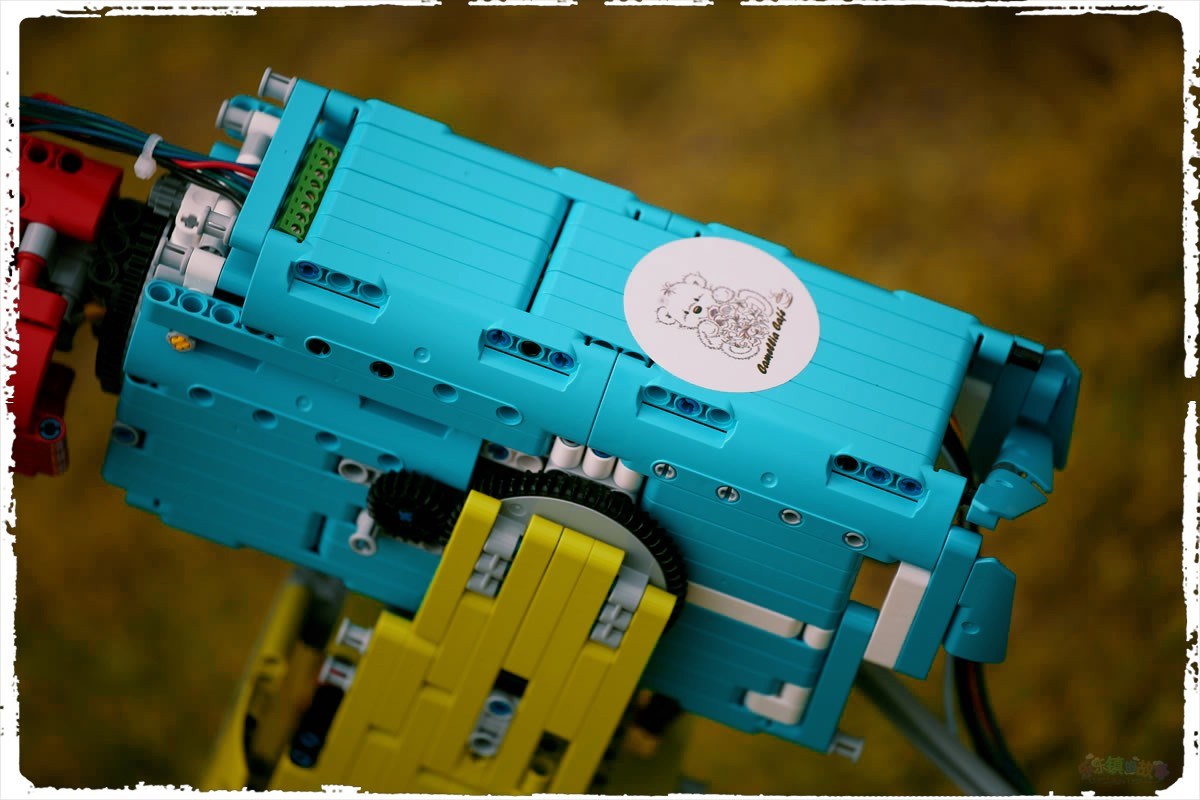
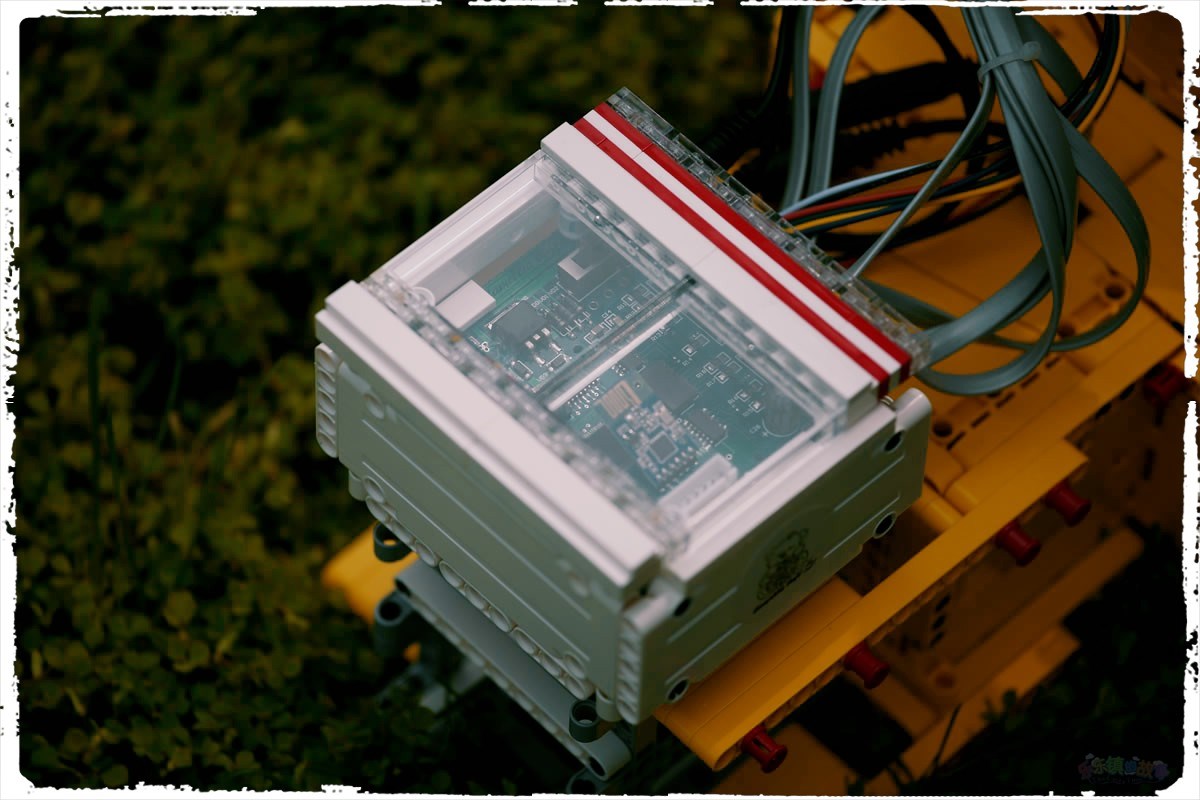
ARM Controller
嵌入式技术控制器
Camellia Café ARM Controller controls 8 Servo Motors or DC Motors.
Camellia Café 嵌入式控制器可以控制8部伺服电机或直流电机。
When talking about Intelligence in Artificial Intelligence, it is no more than a good algorithm. Algorithm is important.